

こちらでは2019国際ロボット展で展示されていた協働ロボットをご紹介します。今回のロボット展では協働ロボットの為にかなりのスペースが割かれており、その注目度をうかがい知ることができました。展示内容については協働ロボットの特徴の展示と、具体的な導入を視野に入れた機能の展示の2つに大きく分けられるという印象を受けました。このページでは全7社の展示を、前述した2つのテーマに沿ってご紹介します。
※協働ロボットとは?について詳しく知りたいという方は、こちらも是非ご参考下さい。
目次
①Universal Robots 協働ロボット界 最大手から大型ロボット新登場
②KUKA クオリティを協働ロボットへ適合
③FANUC より安全・より簡単 新型協働ロボット登場
④ABB 単腕タイプ新登場 場所を選ばず設置可能に
⑤デンソー AI と連動した「自分で考える」協働ロボット
⑥因幡電機産業 協働ロボット × Canon 品質検査の最先端
⑦カンタム・ウシカタ モーションセンサーを活用 熟練の技を直接ロボットにティーチング
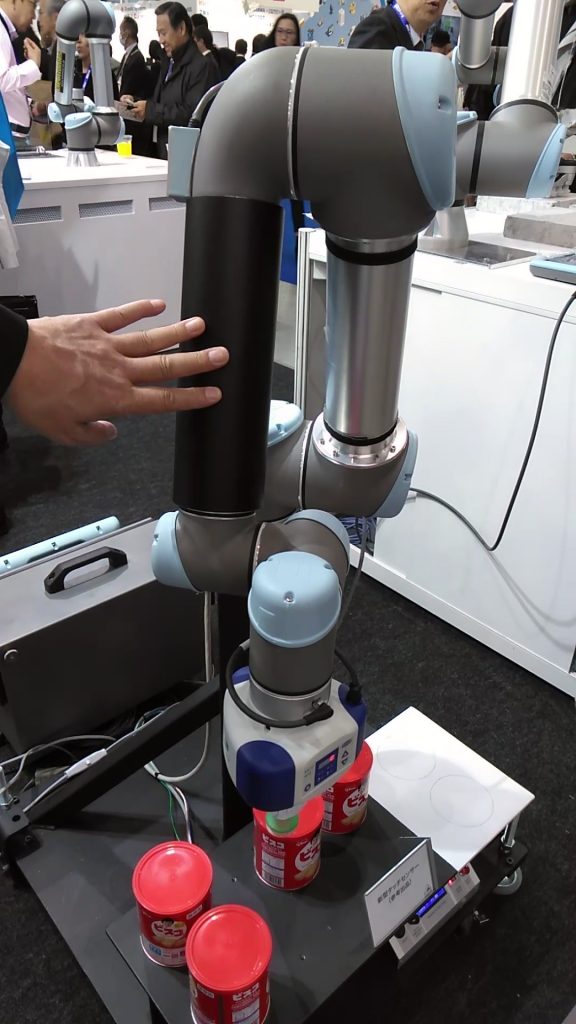
①Universal Robots 協働ロボット界 最大手から大型ロボット新登場
協働ロボットの特徴の展示
協働ロボットの特徴である安全性を活かし、全てのロボットが安全柵なしの状態で展示されていました。展示されている作業内容は多岐にわたり、協働ロボットの柔軟な対応力が分かります。
 UR5e によるねじ締め(画像クリックで動画へ)
UR5e によるねじ締め(画像クリックで動画へ)
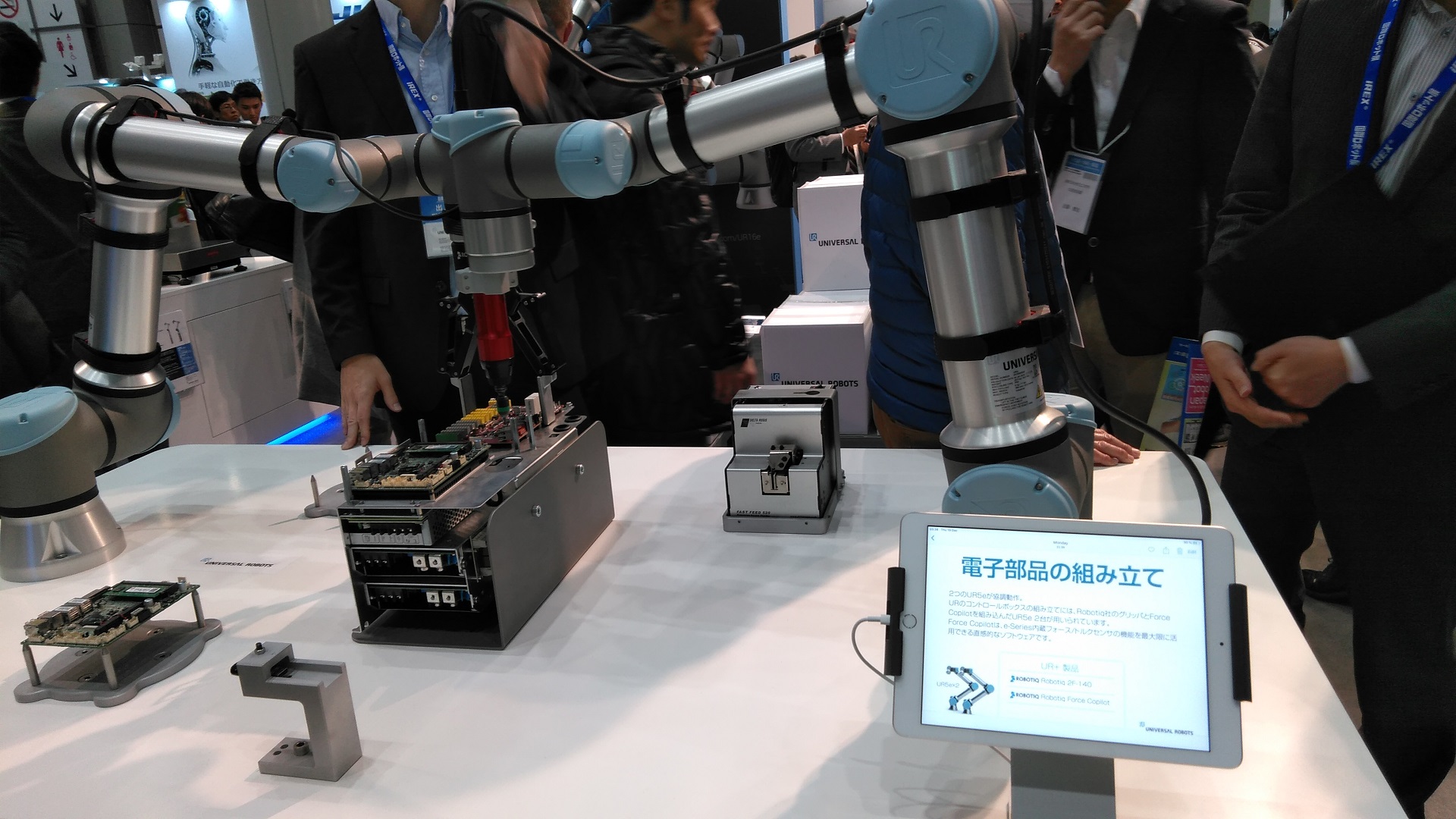
UR5e 2台による電子部品の組み立て(画像クリックで動画へ)
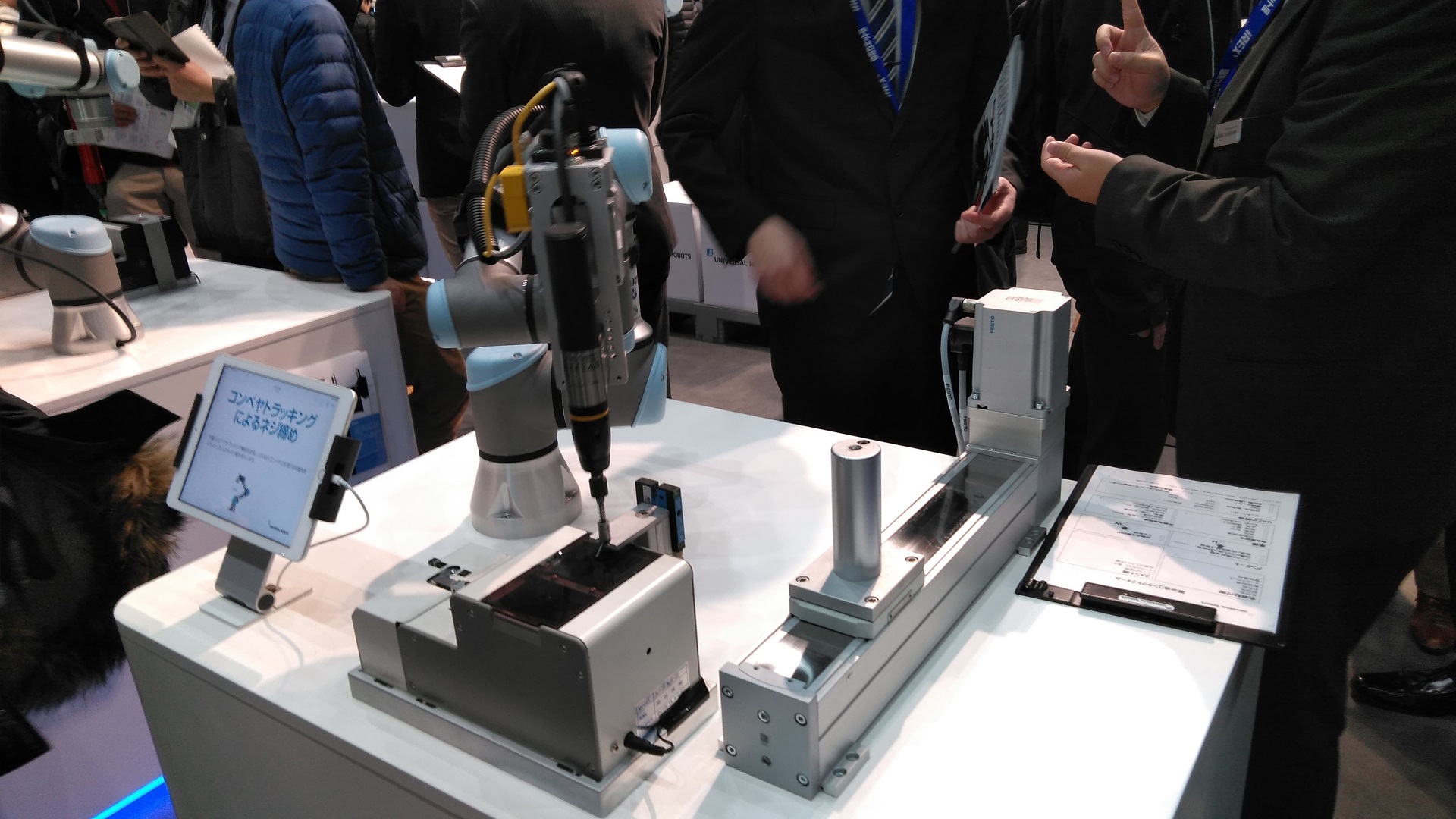
UR5e によるコンベヤトラッキングでのねじ締め(画像クリックで動画へ)
コンベヤ上の動くワークに対しても正確にねじ締めを行うことができる。
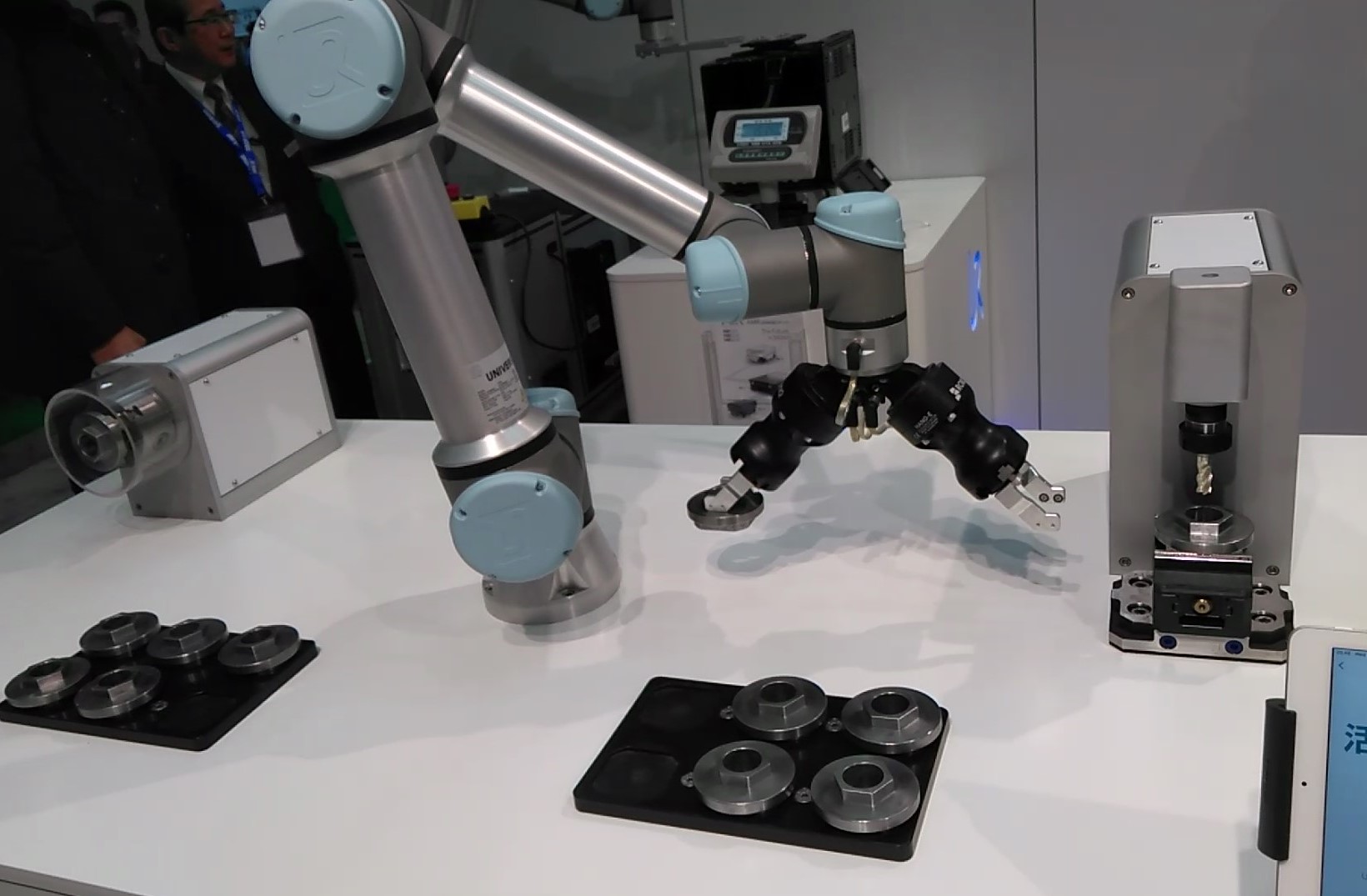
URe3によるデュアルグリッパを活用したマシンテンディング(画像クリックで動画へ)
接続可能なハンド種類の豊富さが、URロボットの作業の幅を広げている。
具体的な導入を視野に入れた機能の展示
新商品として、可搬重量を16kgまで増やした UR16e が登場。3kg~10kgといった今までのURロボットの可搬重量をさらに増やすことで、新たに任せられるようになった作業が展示されていました。
また新機能として、 G-codeによる加工点設定を行った URロボットが展示されていました。これは、通常CNC旋盤等の加工点設定に使用されている G-code をそのまま URロボットの設定に使用できるという機能で、これにより、マシーンごとに設定コードを書き直さなければならない煩わしさが解消されます。
新登場したUR16e
協働ロボットでありながら16kgの重量物を取り扱うことができる。
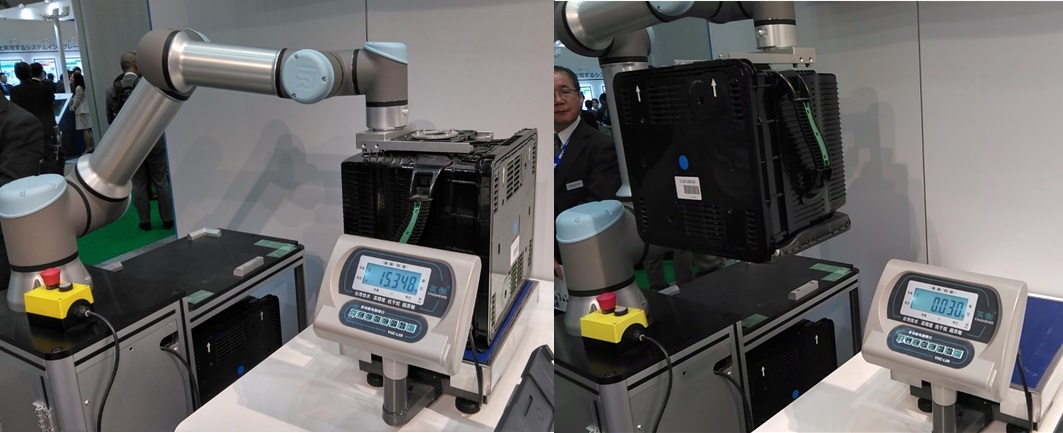
 URe10によるパレタイジング
URe10によるパレタイジング
可搬重量10kgのタイプ。
リーチが半径1300㎜とURシリーズで最長な為、サイズが大きなものも扱うことができる。
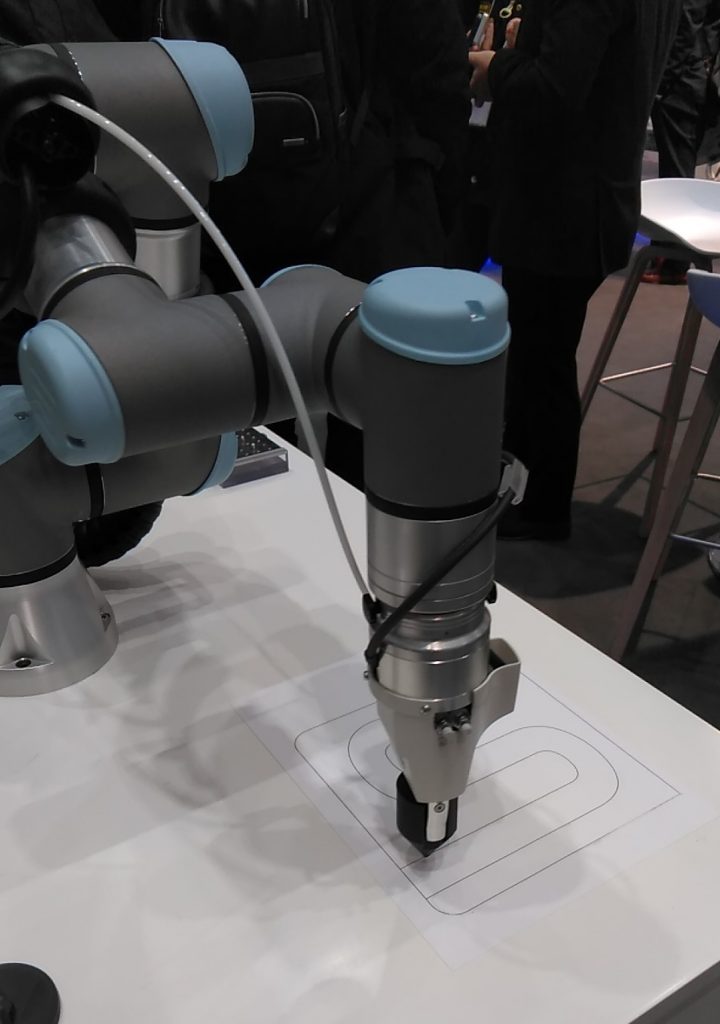
G-code による加工点設定が行われた URロボット(画像クリックでで動画へ)
CNC旋盤等の加工点設定を行う際に使用される G-code を、別のコードに書き直すことなくそのまま URロボットの設定に使用することができるようになった。
協働ロボットの特徴の展示
こちらでは協働ロボット LBR iiwa による力覚センサーを活用した歯車の設置作業が展示され、協働ロボットにも KUKA ロボットのクオリティがそのまま引き継がれていることがアピールされました。この LBR iiwa シリーズは既にダイレクトティーチング機能を搭載している他、より簡単にティーチングできるように専用のユーザインターフェースも開発中とのことです。

LBR iiwa による歯車の設置作業(画像クリックで動画へ)
力覚センサーを活用して歯車の溝の位置を一致させる。
具体的な導入を視野に入れた機能の展示
こちらでは「自立走行型ロボット」として、協働ロボットと自動搬送装置(AGV)を組み合わせたKMR iiwa が展示されました。上部に協働ロボットを乗せた状態で自動搬送装置が走行し、様々な物をより確実に、自動で移動・運搬することができるようになりました。

自立走行型ロボット KMR iiwa
安全柵が必要ない協働ロボットだからこそ、移動しながらの稼働も可能。
協働ロボットの特徴の展示
黄色のボディが特徴的な FANUC ロボットですが、協働ロボットはそれぞれ緑色、白色に着色されています。緑色の CR シリーズは可搬重量 35kg の大型のものや、作業員が周りにいない状態での高速稼働が強みです。更に、新登場した付属のハンドガイドによってダイレクトティーチングも可能になりました。一方、今回新登場した白色の CRX シリーズは安全性を考慮した流線形ボディの導入や軽量化がなされました。また、ダイレクトティーチングにも対応しており、設定がより容易になりました。

FANUC 協働ロボットのラインナップ
新型の CRX シリーズは丸みを帯びたフォルムと軽量化が特徴で、ダイレクトティーチングにも対応。

作業員と働く CR-35iA(画像クリックで動画へ)
可搬重量 35kg の協働ロボットが、重量物を組立作業者の目の前まで持ってくる。

新登場の CR シリーズ用ハンドガイド(画像クリックで動画へ)
付属部品としてハンドガイドを取り付けることで、アームを直接動かしながらの設定が可能に。
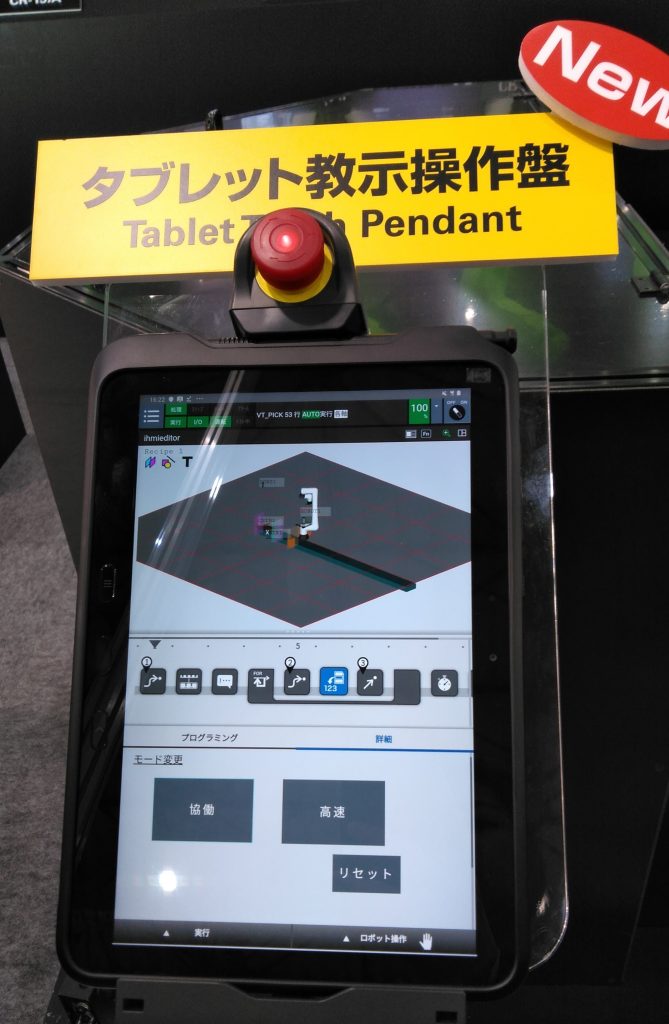
新シリーズの CRX 用に改良されたティンーチングペンダント
アイコン表示といった工夫により、より直感的に設定することができる。
具体的な導入を視野に入れた機能の展示
こちらでは、力覚センサーを使用した協働ロボットによる、部品の篏合作業や、3次元ビジュアルトラッキングシステムを活用した部品移動作業が展示され、これまで産業用ロボットで活用されてきた機能が、協働ロボットの導入にも活かせるということがアピールされました。また、自動搬送装置(AGV)と協働ロボットを組み合わせたパッケージも展示され、完全無人状態のマシンテンディング作業を見ることができました。

力覚センサーを活用した篏合作業を行う CR-15iA(画像クリックで動画へ)
溝の形等が異なる3種類の部品ペアを、それぞれ自分で判断して嵌めることができる。

3Dビジュアルトラッキングシステムを活用した部品移動を行う CRX-10iA / L
異なる向きで流れてくる部品を見極め、掴む部分を正確に判断。コンベヤ上から移動させる。

自動搬送装置(AGV)と協働ロボットによるマシンテンディング(画像クリックで動画へ)
マシンへの部品の出し入れを完全無人化状態で正確に行えることをアピール。
協働ロボットの特徴の展示
こちらでは協働ロボットのみの作業レーンによる、腕時計組み立て・箱詰めの実演がされていました。ベルトの補充や箱詰めされた商品の回収は作業員が行っており、人間の隣で稼働することのできる協働ロボットの特徴をアピールしました。
また新商品として、今まで同社から発売されていた協働型双腕ロボット YuMi の単腕バージョン Single-arm YuMi が展示されていました。柔らかいゴム製のボディや、指を挟みにくい設計、アーム1本が7軸からなることによる柔軟な動きはそのままに、よりコンパクトに。ダイレクトティーチングはもちろん、ティーチングペンダントでの設定もドロップ・アンド・ドラッグでより簡単になりました。
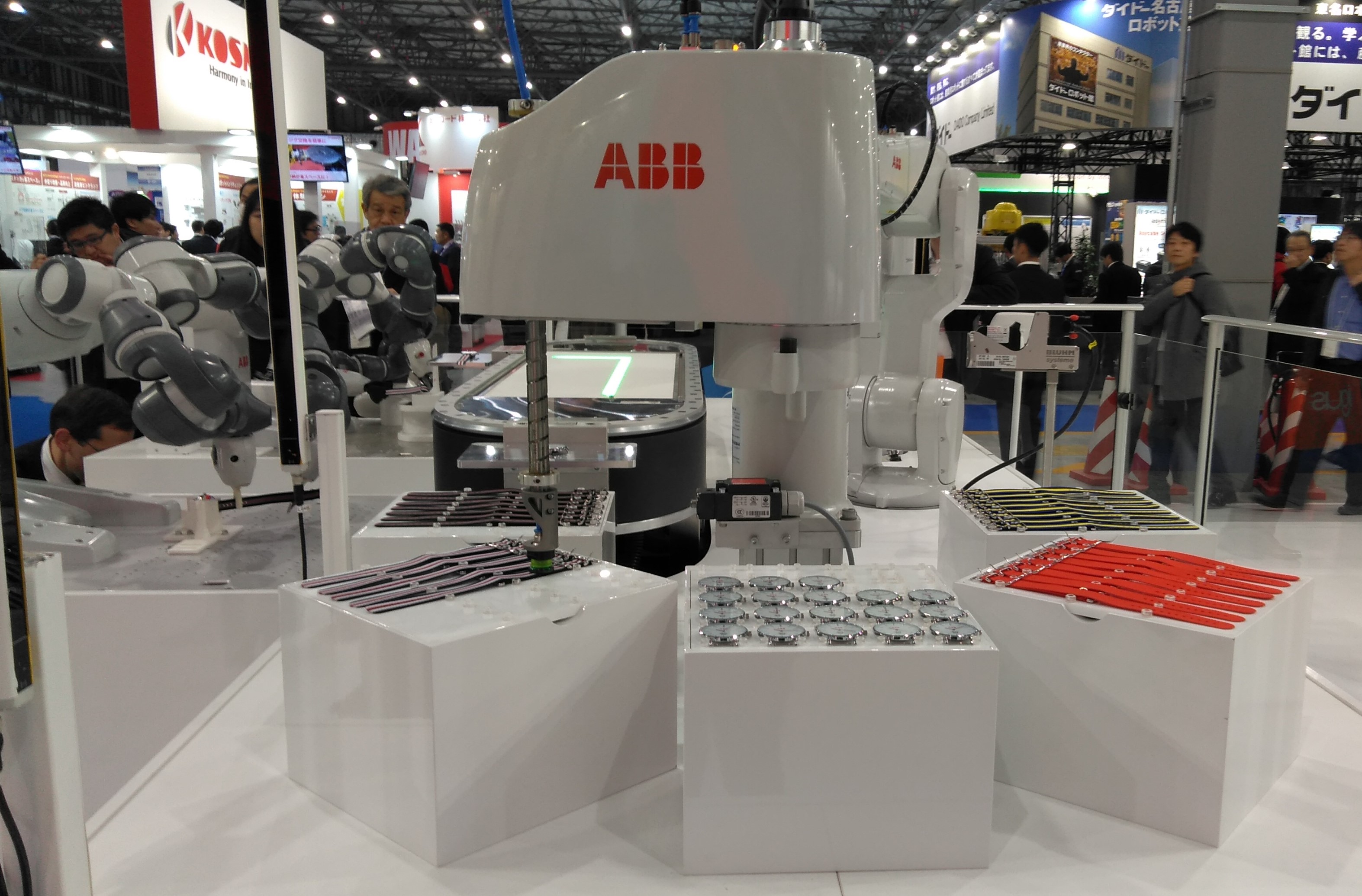 協働ロボット製造ラインによる腕時計の組み立て・箱詰め
協働ロボット製造ラインによる腕時計の組み立て・箱詰め
4種類のベルトから1種類を判別・選択する

腕時計製造ライン内には作業員も入り、協働ロボットと一緒に作業を行う(画像クリックで動画へ)

新登場の協働型単腕ロボット Single-arm YuMi(画像クリックで動画へ)
別の型である協働型双腕ロボット YuMi よりもコンパクトで、壁や天井からも設置可能。
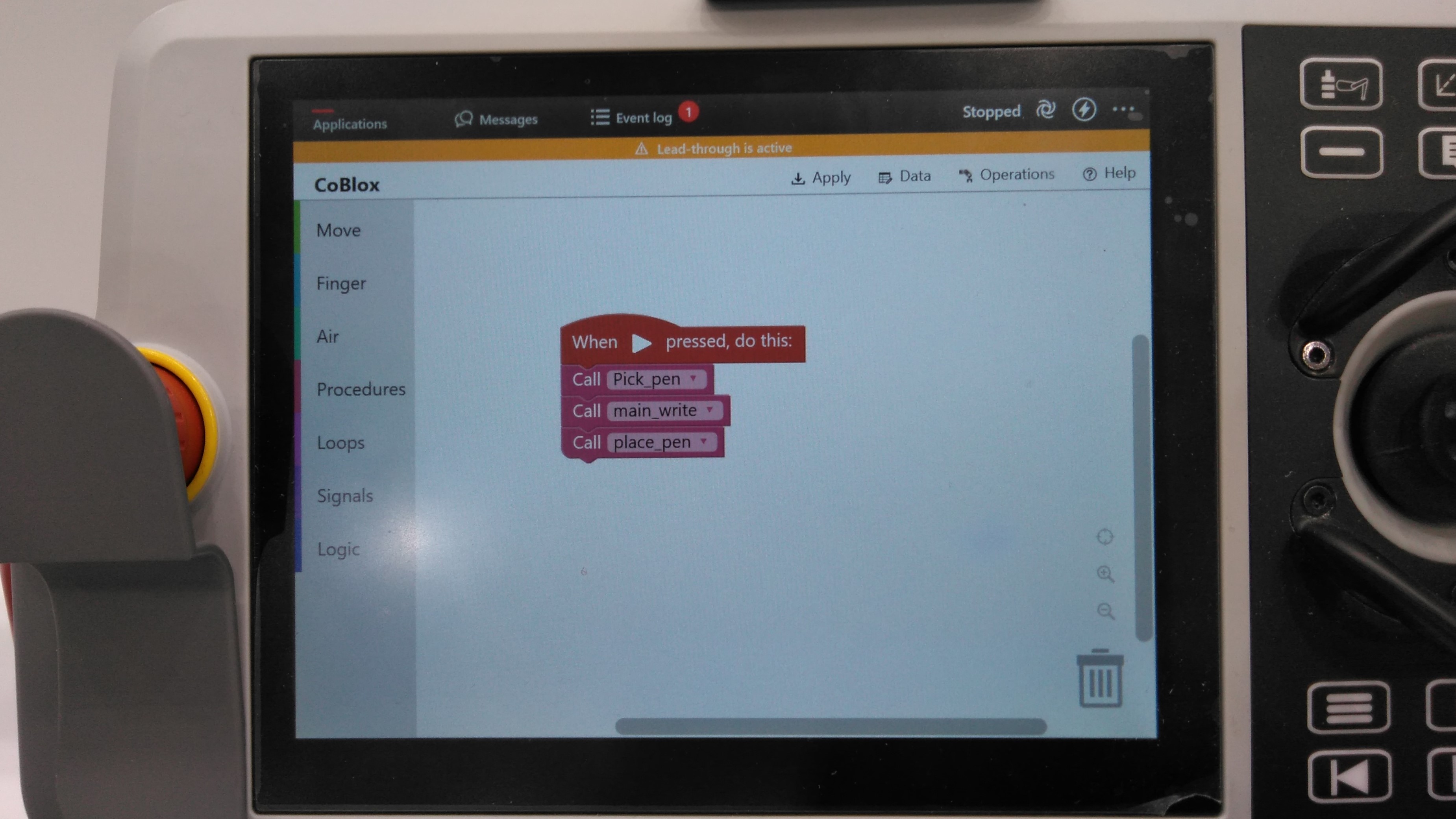
Single-arm YuMi のティーチングペンダント画面
文字や数字を入力することなく、簡単にロボットの設定ができる。
具体的な導入を視野に入れた機能の展示
AI や高性能カメラ等を活用した導入方法が展示され、デンソーの協働ロボット COBOTTA が実際に現場でどのように活用できるのか、具体例を見ることができました。周辺機器によるサポートによって協働ロボットの柔軟な対応力が活き、より様々な作業を任せることができるということが分かります。
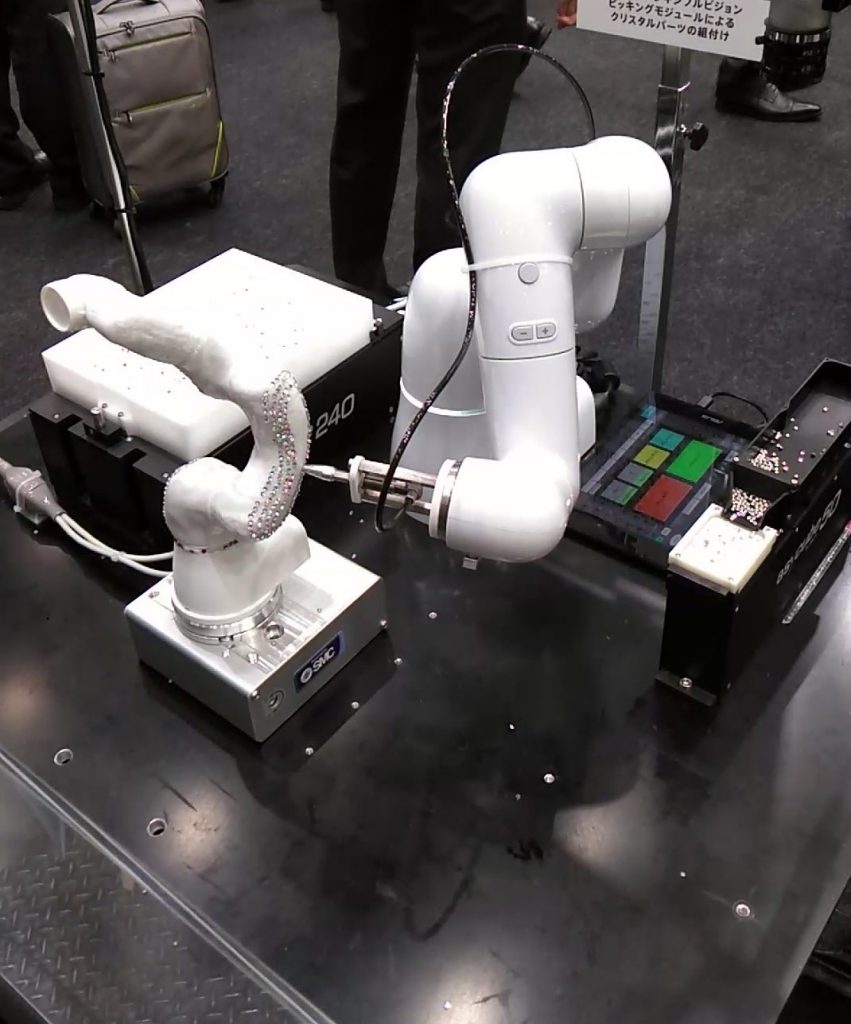
COBOTTA とEVP2 によるクリスタルパーツの取付作業(画像クリックで動画へ)
デンソーウェーブによるピック&プレイス専用の画像処理アプリケーションにより、非常に小さなクリスタルパーツを掴み、決められた場所に取付けることができる。
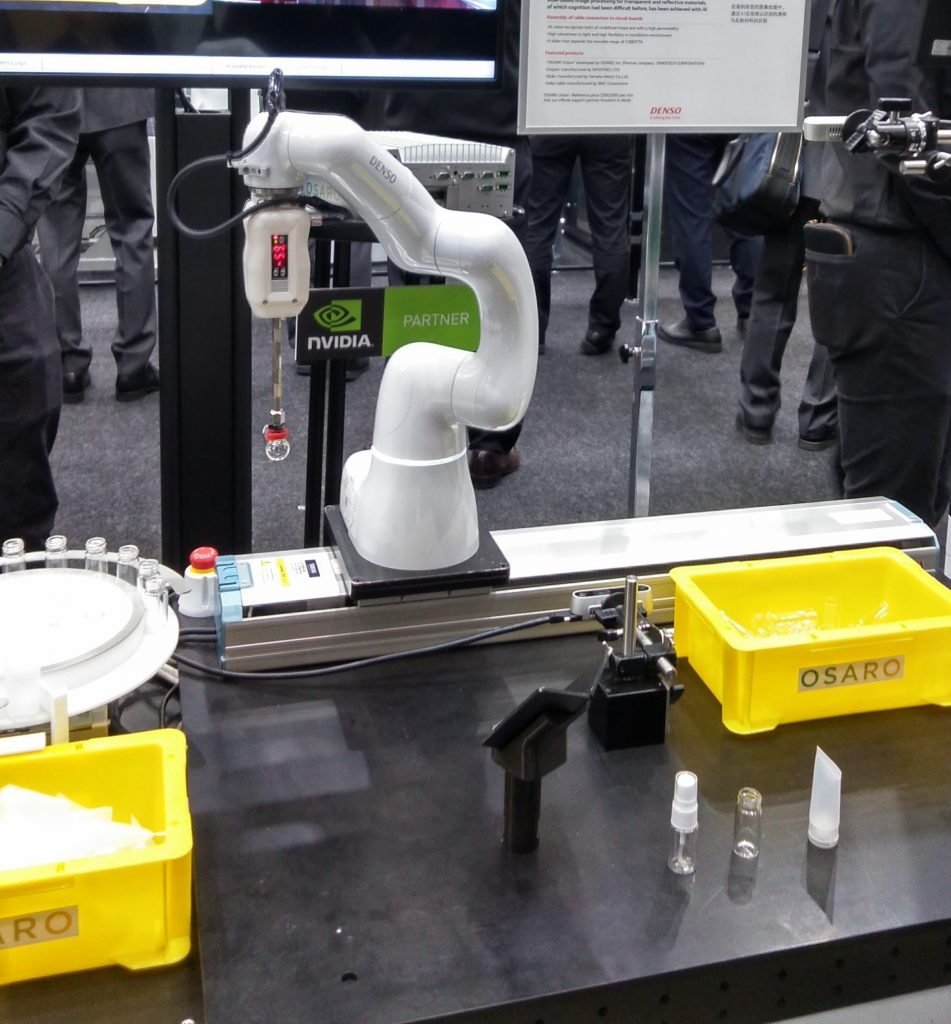
COBOTTA と OSARO Vision によるプラスチック容器の選り分け作業(画像クリックで動画へ)
今まで非常に難しいとされてきた透明な物体や、不定形な物体(ビニール袋等)を判別可能に。
また AI 機能も搭載しており、作業をすればするほど精度が上がり正確に掴める物の種類も増えていく。
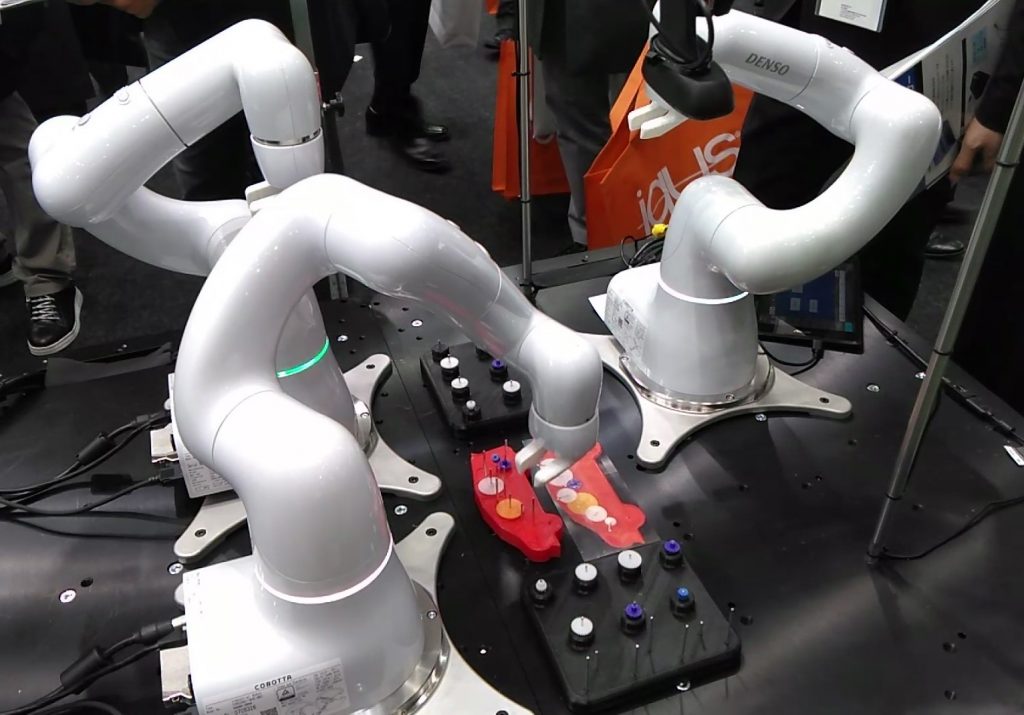
COBOTTA と EXAWIZARDS COREVERY によるギアの組立て作業
AI による作業フロー管理により、作業途中でロボットが減った場合や、作業者が介入して手伝った場合にも再プログラミングなしで作業を続行することができる。
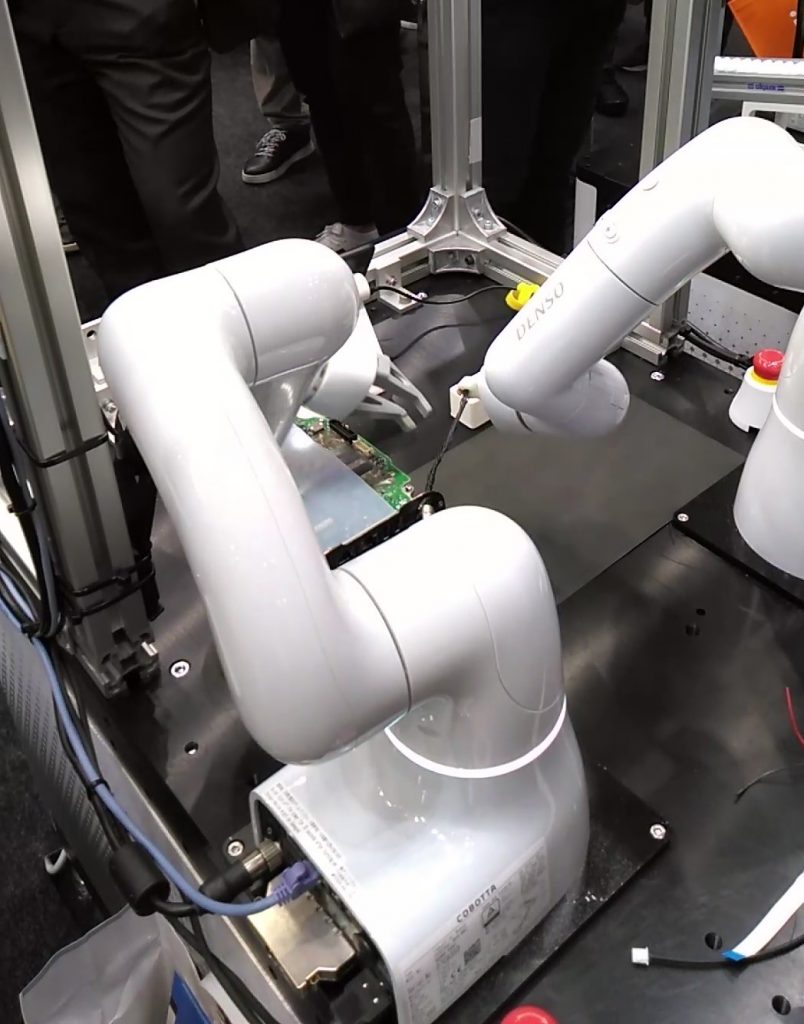
COBOTTA と KURASASENSE によるハーネス取付作業(画像クリックで動画へ)
高精度の 3D ビジョンセンサーにより、これまで困難とされていた不定形物の取り扱いも可能に。
2体の協働ロボットがワイヤー部分を掴んで穴に通し、コネクタを基盤へ取付ける。
⑥因幡電機産業株式会社 協働ロボット × Canon 品質検査の最先端
協働ロボットの特徴の展示
協働ロボットの様々な形として、双腕型スカラロボットと自動搬送装置(AGV)が展示されていました。双腕型スカラロボットは、2つのアームを1度のティーチングで設定できることから、通常の双腕型ロボットよりも設定が容易。しかし軸が少ない為、動きが制限されるという難点もあります。
自動搬送装置(AGV)は、予め床に磁気テープを貼りその上を走行させるタイプと、センサーやGPSを活用し、ソフトウェアで設定した軌道を走行させるタイプの2種類があります。今回展示されていたのはこの2種類を場面によって使い分けることができるハイブリッド型です。

川崎重工の協働ロボット duAro(画像クリックで動画へ)
双腕型スカラロボットの動きをアピール

SHARP の自動搬送装置(AGV) TYPE GL-CUBE (画像クリックで動画へ)
確実性の高い磁気誘導方式と、磁気テープ不要の自立移動方式を切り替えながら走行できる新商品。
具体的な導入を視野に入れた機能の展示
Universal Robots のURロボットと連携した新機能として、 Canon の Vision System が展示されていました。防犯カメラのように天井にカメラを取り付ける為、ロボットアームにカメラを取り付けた場合よりも広いエリアを俯瞰的に見ることができる他、マッチング機能のみでなく、バーコード読み取りやエッジ検出等、検査・点検に必要な様々な機能を搭載しており、画像処理能力に優れています。この視野の広さと高い画像処理能力から、カメラ1台で複数のポイントを素早く検査することができます。
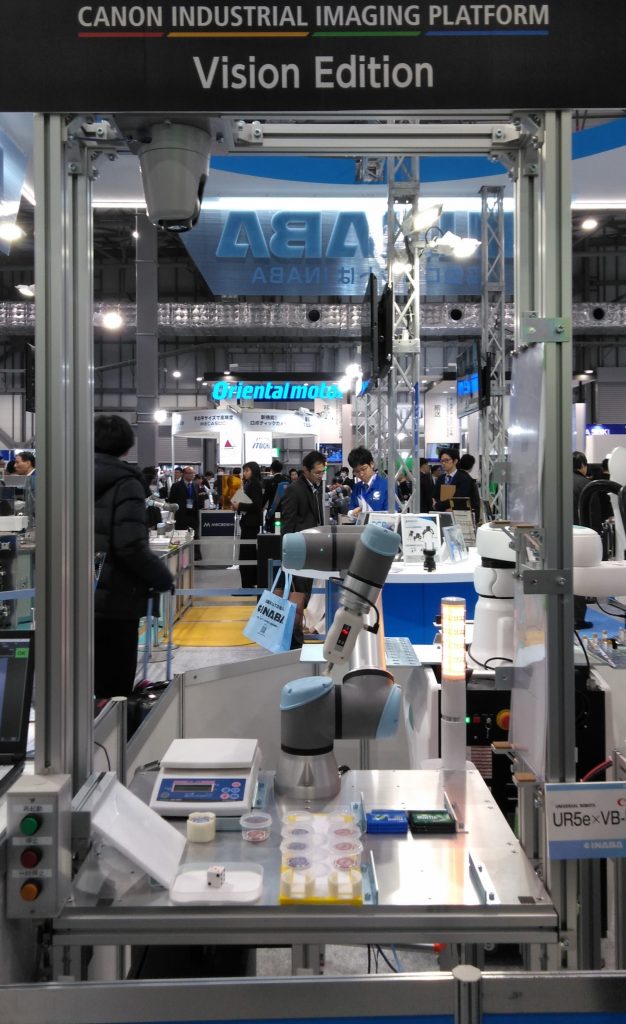
URロボットと Canon の Vision System(画像クリックで動画へ)
バーコード読み取り、色識別、数字認識などを実演。
サイコロの点も読み取り・判断することができる。
⑦カンタム・ウシカタ モーションセンサーを活用 熟練の技を直接ロボットにティーチング
具体的な導入を視野に入れた機能の展示
協働ロボットをよりよく活用するための周辺機器が展示されていました。中でも高精度カメラとモーションセンサによる、物の形や動作の数値化をリアルタイムで行うことができる機能は、品質検査や測定の他に、熟練者の技術を直接ロボットに教え込むことができるものとしてアピールされました。
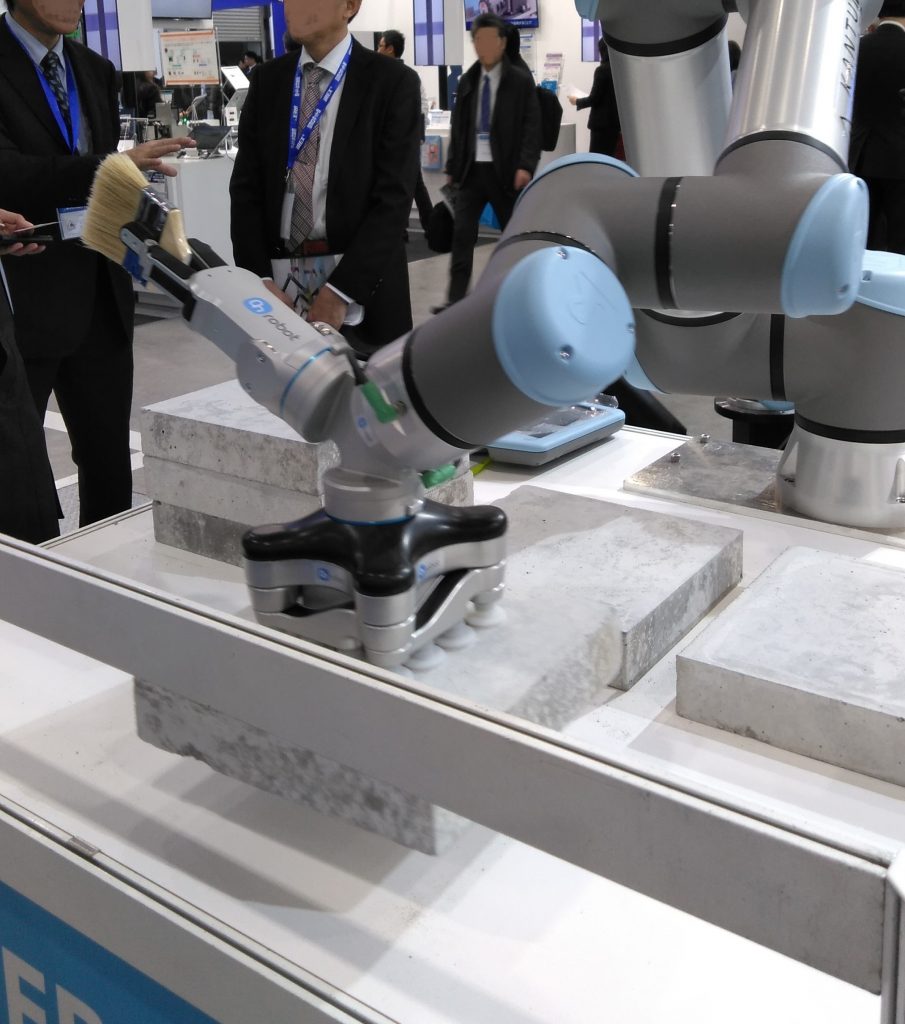
二刀流のロボットアームの展示
吸盤とブラシが入れ替わりながら作業を行う。ハンドの付け替えを行う時間を減らすことができる。
協働ロボット用稼働監視ソフト ろぼ丸 の展示
ブースで展示されていたロボットの稼働を監視中。現時点では最大4台まで同時に監視可能。
タッチセンサーの展示(画像クリックで動画へ)
黒いシート部分がタッチセンサーになっており、協働ロボットの動作を簡単に一時停止することが可能。

Optitrack カメラとモーションセンサーの展示(画像クリックで動画へ)
動く猫を追いかけてロボットアームが動作する様子が展示された。
この機能と協働ロボットのダイレクトティーチング機能を組み合わせれば、熟練作業者の動作をそのままロボットに教え込むことが可能。
以上、2019国際ロボット展の協働ロボット展示についてでした。最後までご覧いただきありがとうございました。


