

2019年12月18日から21日に東京ビックサイトで開催された国際ロボット展を視察してきました。
今回から展示内容を紹介します。
ロボット導入の際、ロボットを一度も使用したことがない現場では、操作の難しさが課題となります。
ロボット操作の難しさに対してロボット展出展各社はどのような解決策を展示していたのでしょうか?
ロボット操作の煩わしさの原因の1つはティーチング作業です。
これをより簡単にする為に、ティーチングペンダントを使用しないティーチング方法が各社で開発されています。
ファナックではジョイスティック方式のハンドガイドユニットを使用したダイレクトティーチングを展示していました。

これによって、これまで緑の協働ロボットではできなかったダイレクトティーチングが可能になります。
さらに、市販のタブレットをティーチングペンダントとして使用するため、初めてロボットを操作する人でも親しみやすいと説明していました。
ティーチングペンダント操作によってロボットを教示点まで移動させる作業は、ロボットを使用したことがない人にとって容易な作業ではありません。
より簡単に操作できるダイレクトティーチングは、ロボット初心者のニーズに応える形で普及していくと思います。
ただし、人の手でロボットアームを直接動かすため、操作するロボットの大きさに限界があるのが難点です。
その難点をクリアし、大型ロボットのダイレクトティーチングを可能としたものがデンソーで展示されていました。
マスター&スレーブ2台のロボットを使用したリモート操作によるダイレクトティーチングです。

YouTube関連動画:https://info.maruyoshi-k.co.jp/contents/video052
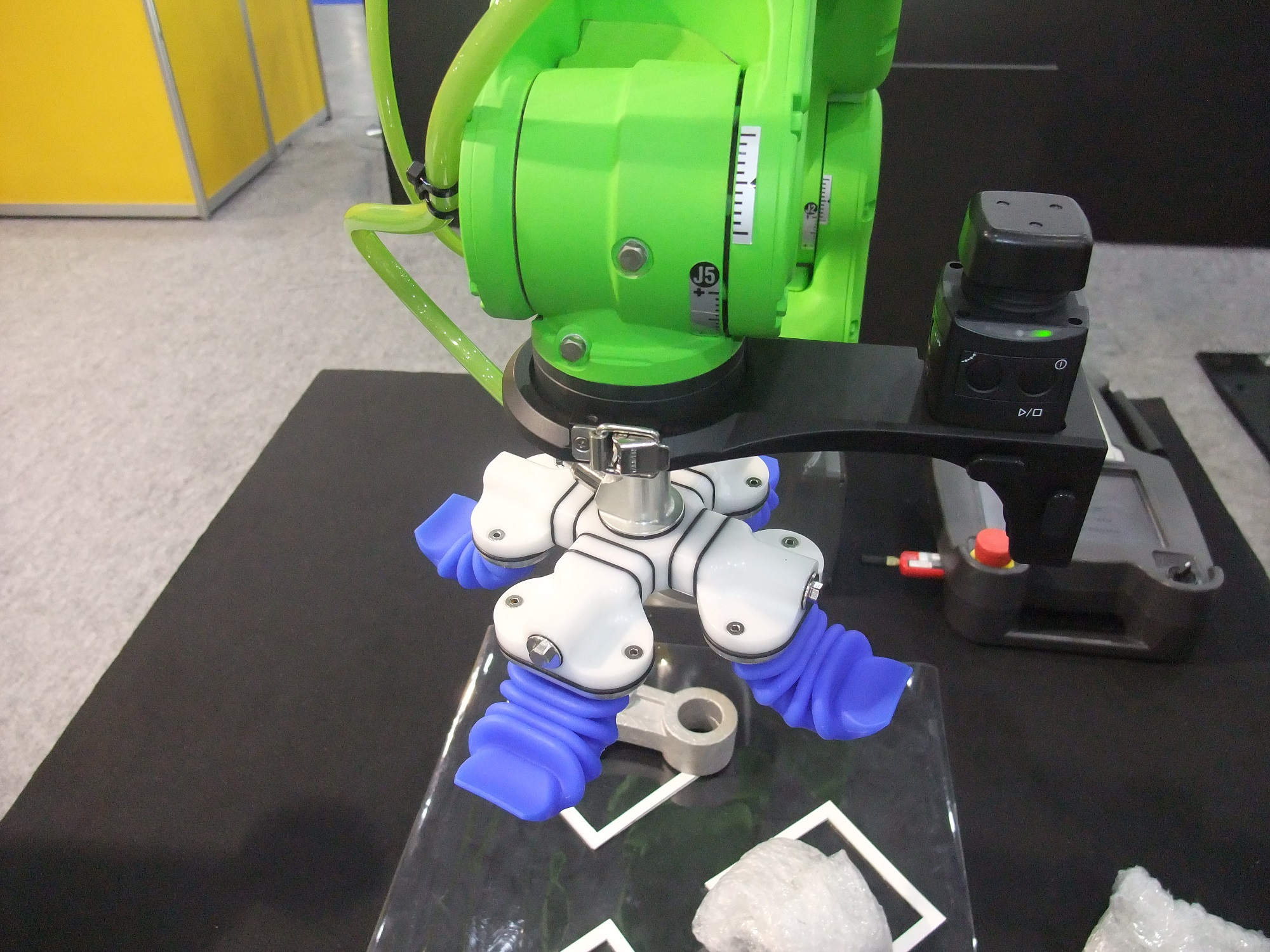
川崎重工業ではリモート操作による感覚的な作業の自動化を提案していました。
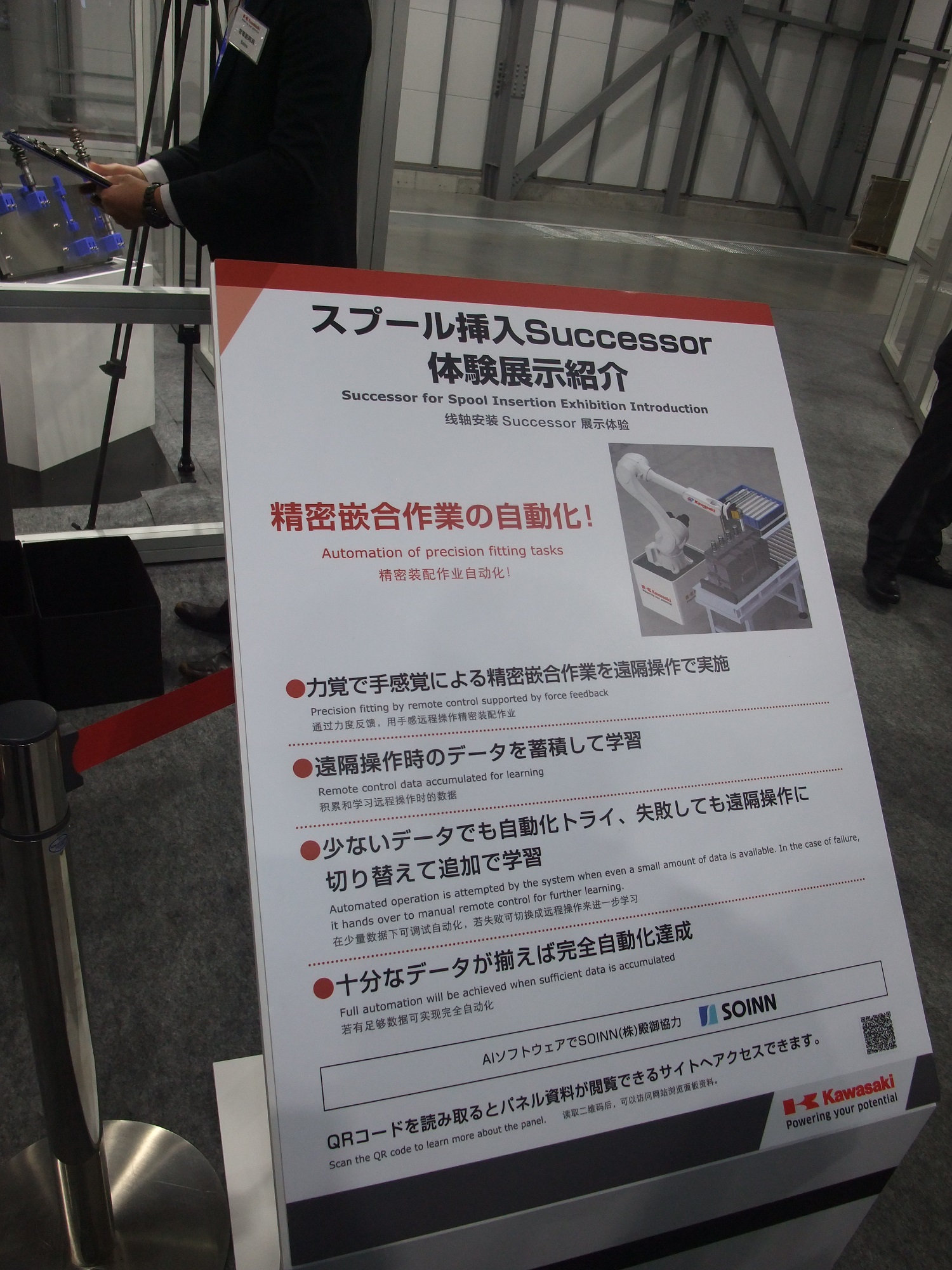
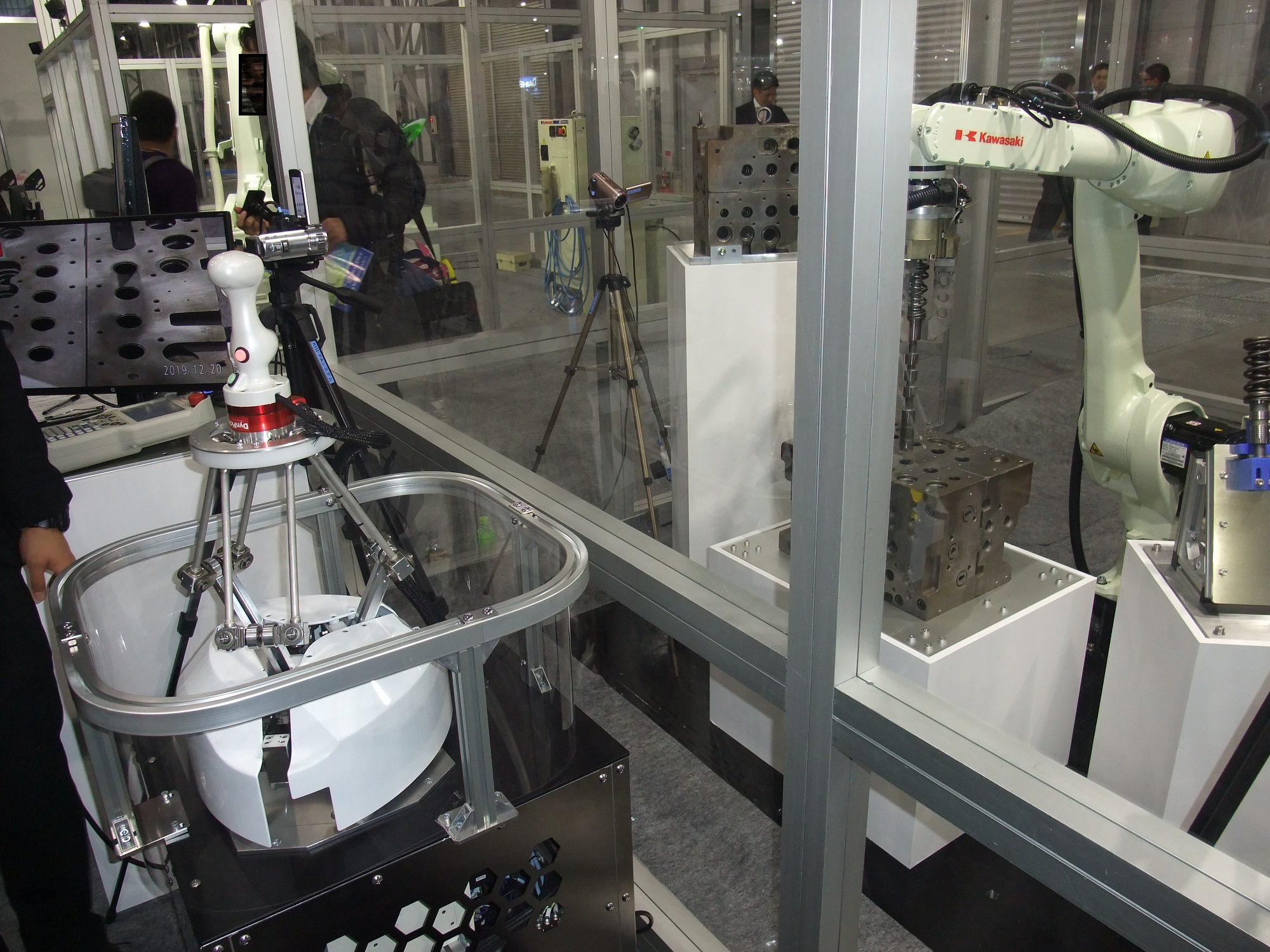
ゲームで使うようなコントローラーを操作するので非常に直感的です。
嵌合は感覚的なので自動化しにくい作業ですが、力覚センサーを使用しているのでスムーズでした。
操作情報がデータとして蓄積されていくので熟練者が操作すれば、その動きを自動化することができます。
ティーチング作業の難易度を高めている原因の1つとして、プログラミング作業もあげることができるでしょう。
その解決策として、ビジュアルプログラミング言語によるロボットティーチングの開発が進められています。
ビジュアルプログラム言語とは Google Blockly を始めとした新しいプログラミング言語のことで、従来のものと異なり、画面上でブロックを組み合わせるだけでプログラムを作ることができます。
ビジュアルプログラミング言語を使用したロボットティーチングは ABB と NACHI で見ることができました。

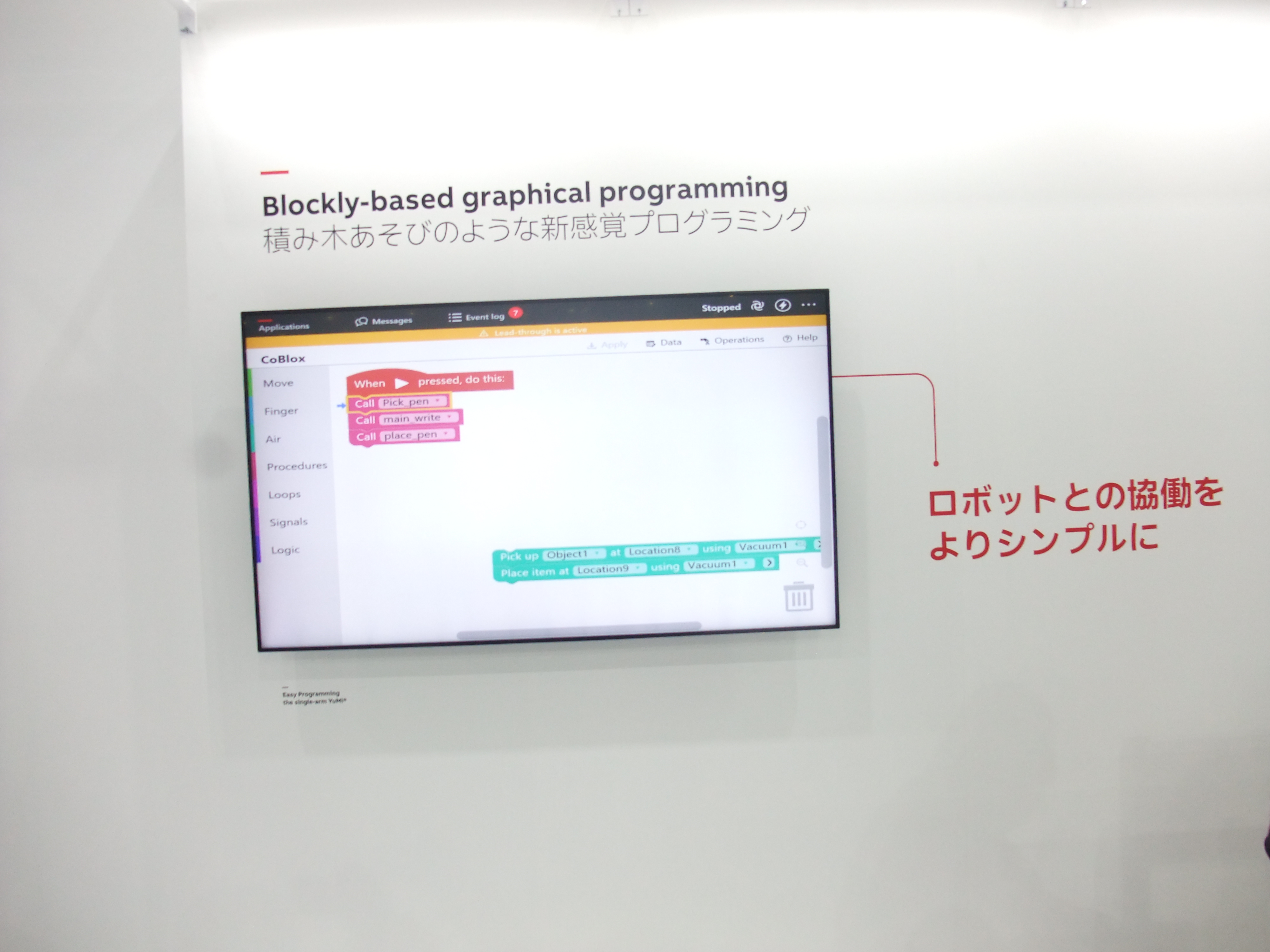
私も操作体験をさせてもらいましたが簡単でした。
現時点では、実際の作業現場で使用されるのはまだ先という印象ですが、将来的にはダイレクトティーチングとビジュアルプログラミング言語を使用したティーチングが普及するかもしれません。
またデンソーブースでは、視覚的にロボットの動きを把握しながらプログラミングを行うことができるオフラインティーチングを展示していました。
これにより、直感的にロボットの動作プログラミングが可能となります。

一方ダイヘンでは、ティーチングペンダントやプログラミング言語はそのままに、ロボットのティーチング作業を手助けするサポートシステムを紹介していました。
IoTを活用し、メーカーがユーザーのティーチングペンダントをリモートで操作するというものです。

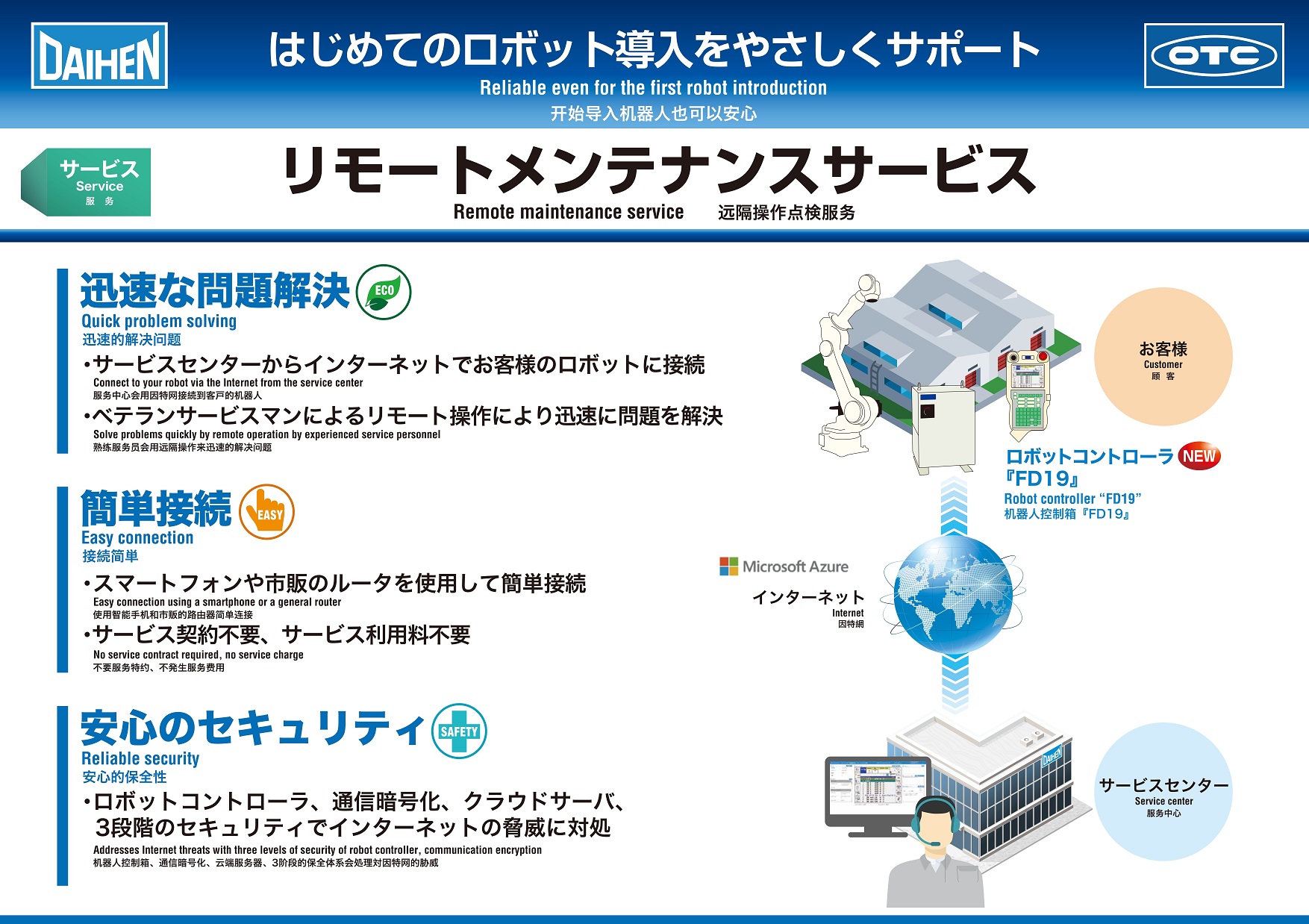
パソコンのチームビューアのようにリモートで操作してもらえるので、ティーチング方法で困った時や、不具合発生時にその場でサポートしてもらえます。
(※ロボット動作は安全のためリモートではできないそうです。)
故障発生時の修理対応では、リモートでティーチングペンダントに入って状況確認ができるので、これまでのような電話のみのやり取りよりも正確に不具合状況の確認や対応が可能になり、ダウンタイムの削減にも繋がります。
以上、今回はロボット導入のハードルをさげるソリューション展示を紹介しました。
ロボット操作の難しさがロボット導入のハードルになっていることは間違いありません。
今後もテクノロジーを使っていかに簡単に操作できるようにするか開発は続いていくと思います。
視察記事で興味がある内容や、質問等がございましたら
弊社の担当営業にお気軽にお願い致します。


