

2019年6月25日~28日まで上海で行われた北京エッセン(溶接展示会)を視察してきました。前回に続き5回に分けて、その様子を皆様にお伝えします。今回は、展示されていた溶接ロボットをご紹介します。
中国国内では、人件費高騰や溶接工の不足などで自動化のニーズが高まっています。今回の北京エッセンの自動化の展示では、これからロボットを導入したいと考えているユーザーが主なターゲットだったようです。ロボットを使用したことがないユーザーに対して、現在、人の手で溶接しているものが、ロボットだとどのようにできるのか、その為にはどのように導入すればよいのかを見せる展示が多く見られました。

ABBの展示より
スポット溶接用ロボットの基本的動作を実演

KEMPPI(中国ローカルメメーカー)
アーク溶接ロボットの基本的動作を実演

KUKAの展示より
最先端溶接機(フローニアスCMT)でのロボット溶接導入の基本的な構成を展示

FANUCの展示より
具体的なワークでのアーク溶接ロボットの展示
鉄塔の製造に使われるワークを展示し、複雑な形状の部品でもロボットで自動化が可能なことをアピール
一方で、高い技術力のロボットシステムを求めているユーザー向けの展示もありました。特徴的なものは、複数台ロボットを使用した溶接システムです。広い国土をもつ中国は、工場においても作業スペースを充分にとることができます。設置面積を多くとるロボットシステムも、実現可能なものとしてユーザーから注目を浴びていました。

安川電機の展示より
複数台の溶接・ハンドリングロボットとポジショナーを協調制御したロボットシステムを展示
部品①を専用の治具へと移動している間に部品②を溶接…というように全く異なる3種類の部品の溶接を同時にこなしている

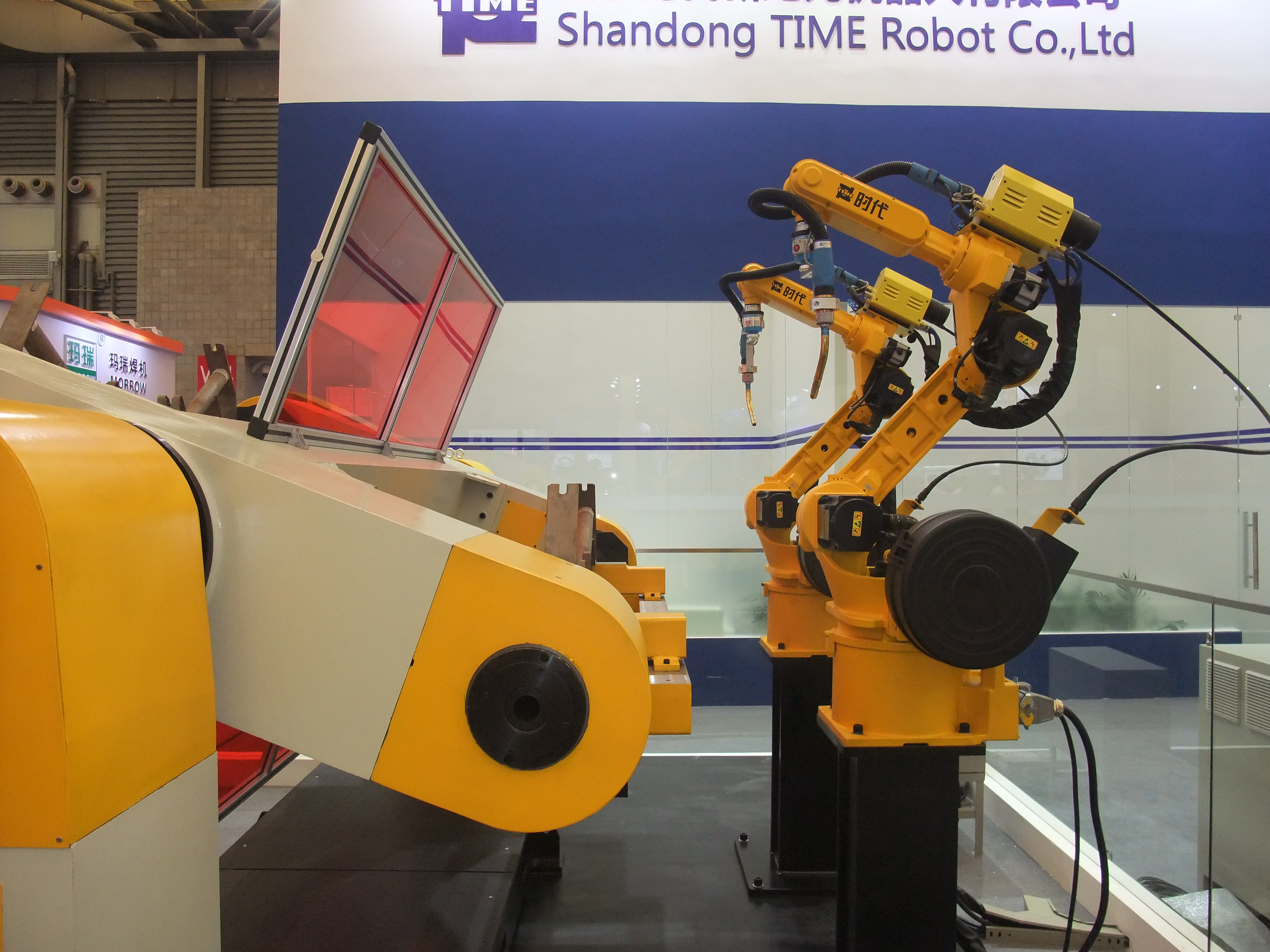
山東時代(中国ローカルメーカー)の展示より
溶接ロボットとワーク移動・保持のためのロボットを協調制御させた治具レスの溶接システムを展示
ロボットアームに持たせて溶接・移動することで、少量多品種のワークに対応しやすくなる
動画:https://info.maruyoshi-k.co.jp/contents/video024

動画:https://info.maruyoshi-k.co.jp/contents/video025
(上)山東時代の展示より(下)FANUCの展示より
観覧車タイプのポジショナーを使ったロボットシステム
日本では採用実績の少ない観覧車ポジショナーも複数のブースで展示。治具を動かすことで、自動的に溶接前、溶接後のワークを回転移動させることが可能。これによって、作業者がワークに併せて動く必要がなくなる。また、縦にワークを動かすことができるため場所も節約
北京エッセンでは、自動化をこれから導入していく見学者が多い中で、ロボットのできることや、生かし方といった可能性を基本的な部分からアピールする展示が多く見られました。また、ユーザーに合わせた最新技術の展示の中では、大型設備の導入が多くの工場において実現可能なものとして注目を集めていたのが特徴的です。
以上、北京エッセンから “ロボット溶接”の展示内容をお伝えしました。
第3回では、北京エッセンにおいて多くの企業の展示に登場した“位置補正センサー”についてお伝えします。
【視察報告】北京エッセン2019 vol.3 “位置補正センサー”


